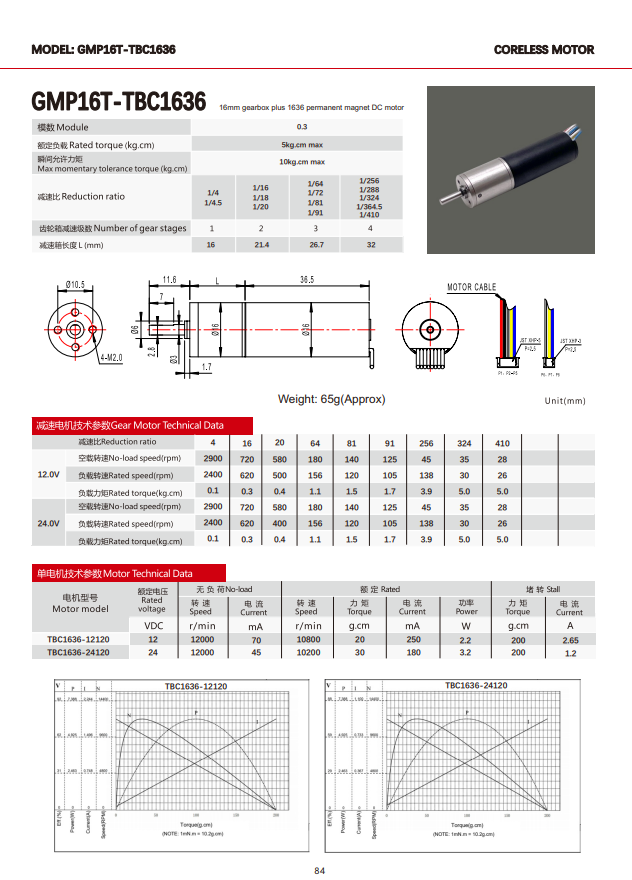
GMP16T-TBC1636 300mNm 12V 24V 16mm Coreless Motor Brushless DC Motor yeMidziyo Yekurapa Faulhaber Maxon Motor Replacement





1. Kushanda nesimba zvakanyanya uye kuchengetedza simba, mwero wekushandura simba unodarika 90%
Dhizaini yekapu isina core hollow cup inoshandiswa kubvisa zvachose eddy current uye hysteresis, uye simba rekushandura simba rinogona kusvika kupfuura 90%, izvo zvinoderedza zvakanyanya kushandiswa kwesimba uye zvakakodzera michina yekurapa inoda kushanda kwenguva yakareba.
Tekinoroji isina mabhurashi inoderedzawo kukweshana uye kurasikirwa nemabhurashi, inovandudza mashandiro esimba, inotsigira 12V/24V wide voltage input, inochinjika kumabhatiri e lithium kana magetsi anogadzikiswa nemagetsi, uye inopindura nenzira dzakasiyana-siyana pakushandiswa kwesimba.
2. Mhinduro yakasimba uye kutonga kwakarurama
Kusashanda zvakanaka kwerotor kwakaderera zvikuru (kutenderera kushoma kunongova 1/3 chete yemota dzechinyakare), nguva yenguva yemuchina yakaderera kusvika kumamirisekonzi gumi, inotsigira kuchinja kwekutanga nekumira nekuremerwa ipapo ipapo, uye inosangana nezvinodiwa zvekufamba nemazvo zvemidziyo yekurapa (yakadai semajoini erobhoti ekuvhiya, mapombi e-micro-injection)
Pamwe chete netekinoroji yemagetsi yekuchinja, inotsigira PWM speed regulation uye closed-loop control, ine linear speed regulation performance yakanaka, uye torque fluctuation iri pasi pe2%, iyo yakakodzera high-efficiency flow regulation kana position control.
3. Ruzha rwakaderera zvakanyanya uye kudedera
Hapana kukweshana kwemabhurashi nemagetsi, kukanganiswa kwemagetsi kwakaderera zvakanyanya (EMI), uye ruzha rwekushanda <40dB, izvo zvakakodzera munzvimbo dzekurapa (dzakadai semamonita, michina yekufema yekurara) uye mamiriro epamba (akadai semassager, mabhurashi emazino emagetsi) zvine zvinodiwa zvakasimba kuti pave nerunyararo.
4. Dhizaini diki uye yakareruka
16mm dhayamita diki-diki, huremu hwakareruka, simba rakawanda, inochengetedza nzvimbo yemidziyo, inonyanya kukodzera zvishandiso zvekurapa zvinotakurika (senge ma ultrasound probes anobatwa nemaoko) kana ma micro robot drive modules
5. Hupenyu hurefu uye kuvimbika kwakanyanya
Dhizaini isina mabhurashi inodzivirira kupfekwa kwemabhurashi, uye nemabheringi asingapfekwi nemagiya esimbi, hupenyu hunogona kusvika makumi ezviuru zvemaawa, zvichizadzisa zvinodiwa zvemidziyo yekurapa. Mamwe mamodheru anotsigira dziviriro yeIP44, haapfuuri guruva uye haapindi mvura, akakodzera nzvimbo dzine hunyoro kana guruva.
1. Kuburitsa torque yakakura uye kumhanya kwakafara
Torque yakayerwa i300mNm, torque yepamusoro inogona kusvika 450mNm, nebhokisi remagiya epasi (reduction ratio inogona kugadziriswa), torque yakakwira inobuda nekukurumidza (senge kusungirirwa kwakanyatsojeka kwemidziyo yekuvhiya) kana kushanda kwakasimba nekukurumidza (senge centrifuge)
Kumhanya kwemagetsi kuri pakati pe1:1000, zvichitsigira kuchinja kwemamiriro ezvinhu akawanda kubva pa torque yepamusoro ine kumhanya kwakaderera kuenda ku torque yakaderera ine kumhanya kwakakwirira, zvichienderana nezvinodiwa zvekudzora zvakaoma.
2. Mabhenefiti etekinoroji isina mabhurashi
Tekinoroji yemagetsi inobvisa kupindira kwemagetsi uye electromagnetic, inopfuura chitupa chekurapa cheEMC, uye inoita kuti ienderane nemidziyo yemagetsi inonzwisisika (yakadai semidziyo yeMRI)
Mota isina mabhurashi inotsigira magnetic encoder kana Hall sensor feedback kuti iwane kudzora kwakavharwa, kurongeka kwekuisa ±0.01°, yakakodzera michina inoshanda otomatiki (senge endoscope steering system)
3. Kupisa kupisa uye kugadzirisa tembiricha
Kuyerera kwemhepo pamusoro pemukati nekunze kwechimiro chekapu isina chinhu kunowedzera kupisa, uye nesimbi yemagineti inodzivirira kupisa zvakanyanya uye ganda rinoitisa kupisa, kukwira kwekupisa kunoderedzwa ne30% zvichienzaniswa nemamota echinyakare, zvichiita kuti kushanda kwakasimba munzvimbo dzinopisa zvakanyanya (senge michina yekuuraya utachiona)
1. Nzvimbo yemidziyo yekurapa
Midziyo yekuongorora: ruoko rwekutamisa sampuli rwe biochemical analyzer, endoscope rotary joint drive
Midziyo yekurapa: module yekuisa insulin pombi chaiyo, musoro wesimba rekuboorera mazino, robhoti rekuvhiya rine simba reruoko (robhoti rimwe chete rinoda mamota ekapu 12-20 asina chinhu)
Sisitimu inotsigira hupenyu: ventilator turbine drive, oximeter micro pombi
2. Kuchengetwa kwemba kwakangwara uye kutarisirwa kwemunhu
Kutarisirwa kwehutano: module yekukwiza pfuti ine ruzha rwepamusoro, dhiraivha yemagetsi yekugera blade
Midziyo yepamba yakangwara: robhoti rinotsvaira, maketeni akangwara
3. Kuzvigadzira otomatiki kwemaindasitiri nemarobhoti
Michina yekunyatsoongorora: AGV guide wheel drive, micro robot joints (senge robot finger actuators)
Midziyo yekuona: kugadzirisa kutarisa kwekutarisa kwe optical scanner, kudzora otomatiki gripper yemutsara wekugadzira
4. Minda iri kukura
Zvigadzirwa zvemagetsi zvevatengi: drone servo, gimbal stabilizer zoom control
Mota itsva dzesimba: kugadziriswa kwemhepo inotonhodza mota, bhatiri rinotonhodza fan drive